










































































































































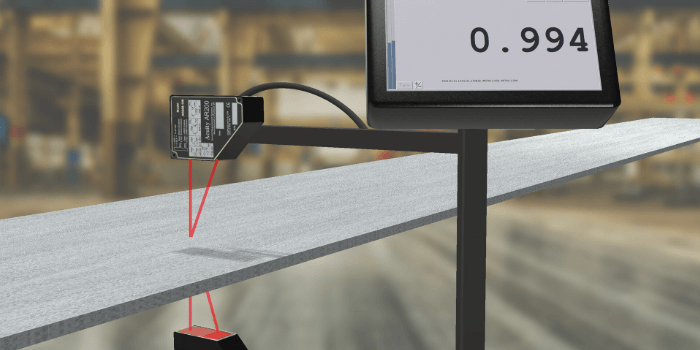
激光线扫相机在工业检测、逆向工程等领域应用广泛,其获取的深度数据需要经过一系列处理才能得到最终的三维模型。本文将介绍激光线扫相机深度数据的高效处理方法及关键步骤,帮助读者了解并掌握这一技术。
一、数据采集:良好的开端是成功的一半
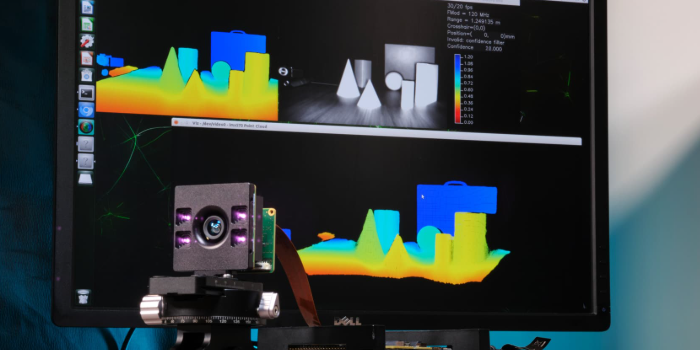
1、选择合适的扫描速度和分辨率:扫描速度过快会导致数据丢失,分辨率过低会影响模型精度。根据实际需求选择合适的参数。
2、保证光照条件稳定:光照条件的变化会影响深度数据的质量。尽量在稳定的光照环境下进行数据采集,或采用主动光源。
3、标定相机参数:准确的相机参数是进行后续数据处理的基础。在数据采集前,需要对相机进行标定,获取其内参和外参。
二、预处理:为后续处理打好基础
1、去除噪声点:深度数据中 inevitably会存在一些噪声点,需要使用滤波算法将其去除。常用的滤波算法有高斯滤波、中值滤波等。
2、数据补全:由于遮挡等原因,深度数据中可能会存在一些缺失的部分,需要进行数据补全。常用的数据补全方法有基于邻域的方法、基于模型的方法等。
3、点云配准:如果需要将多个视角的深度数据融合成一个完整的三维模型,需要进行点云配准。常用的点云配准算法有ICP算法、NDT算法等。
三、三维重建:点云数据“化茧成蝶”
1、点云三角化:将点云数据转换成三角网格模型。常用的三角化算法有Delaunay三角化、泊松重建等。
2、网格简化:三角网格模型的顶点数和面数通常很多,需要进行简化以提高后续处理效率。常用的网格简化算法有边折叠算法、顶点聚类算法等。
3、纹理映射:如果需要为三维模型添加纹理,需要进行纹理映射。纹理映射即将二维图像映射到三维模型表面。
四、模型优化:精益求精,追求完美
1、模型平滑:去除模型表面的噪声和尖锐边缘,使模型更加光滑。常用的模型平滑算法有拉普拉斯平滑、双边滤波等。
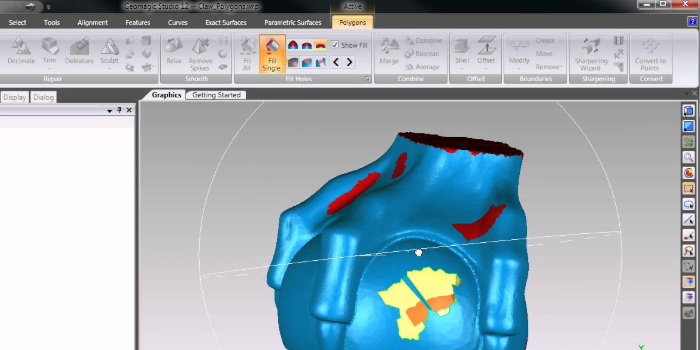
2、孔洞修补:修补模型表面的孔洞。常用的孔洞修补方法有基于邻域的方法、基于模型的方法等。
3、模型简化:进一步简化模型,减少顶点数和面数,提高渲染效率。
五、软件工具:事半功倍的利器
1、Geomagic Studio:一款功能强大的三维扫描数据处理软件,可以进行点云处理、三维重建、模型优化等操作。
2、CloudCompare:一款开源的点云处理软件,功能丰富,操作简便。
3、MeshLab:一款开源的网格处理软件,可以进行网格简化、平滑、修补等操作。
以下是您可能还关注的问题与解答:
Q:激光线扫相机深度数据处理的难点是什么?
A:难点主要在于噪声处理、数据缺失、点云配准等方面。
Q:如何提高激光线扫相机深度数据的处理效率?
A:选择合适的算法和软件工具,并对数据进行预处理可以提高处理效率。
Q:激光线扫相机深度数据处理的应用有哪些?
A:应用于工业检测、逆向工程、三维建模等领域。
激光线扫相机深度数据处理是一个复杂的过程,涉及多个步骤和多种算法。掌握这些关键步骤和方法,选择合适的软件工具,才能高效地处理深度数据,并获得高质量的三维模型。






