










































































































































三维激光扫描仪是现代测量技术的一项重要创新,它能够快速、精确地捕捉物体的三维数据。本文将为您揭秘三维激光扫描仪的工作原理,让我们一起探索这项革命性技术背后的奥秘。
一、三维激光扫描仪的基本概念
1、三维激光扫描仪是一种高精度的光学测量设备,它通过发射激光束并接收反射信号来获取物体表面的三维坐标信息。
2、这种设备能够在短时间内采集大量的点云数据,形成物体的精确三维模型。
3、三维激光扫描仪广泛应用于工程测量、建筑设计、文物保护等多个领域,为我们提供了前所未有的空间数据采集能力。
二、三维激光扫描仪的核心工作原理
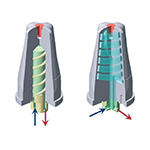
1、飞行时间法(Time of Flight, TOF):这是最常用的原理之一。扫描仪发射激光脉冲,测量激光从发射到接收反射信号的时间,根据光速计算出距离。
2、相位差法:通过比较发射和接收激光信号的相位差来计算距离。这种方法通常能提供更高的精度,特别是在中短距离测量中。
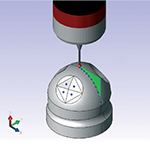
3、三角测量法:适用于近距离高精度测量。通过已知的基线长度和角度,利用三角函数原理计算目标点的空间位置。
三、三维激光扫描仪的关键组件
1、激光发射器:产生高能量、高定向性的激光束。常用的激光类型包括半导体激光二极管,波长范围通常在905nm至1550nm之间。
2、接收器:捕获从目标物体反射回来的激光信号。通常使用高灵敏度的光电二极管或雪崩光电二极管。
3、扫描系统:通常包括旋转镜或棱镜,用于引导激光束在不同方向上扫描。扫描速度可达每秒数十万点。
4、信号处理单元:将接收到的光信号转换为数字信息,并进行实时数据处理。

四、三维激光扫描仪的性能参数
1、测量范围:不同型号的扫描仪测量范围差异很大,从几米到几百米不等。高端设备可达1000米以上。
2、精度:通常在毫米级别,高精度设备可达亚毫米级。例如,某些工业级扫描仪的精度可达±0.1mm。
3、扫描速度:现代三维激光扫描仪的扫描速度非常快,高端设备可达每秒100万点以上。
4、角分辨率:决定了扫描的密度,通常在0.001°到0.5°之间。
五、三维激光扫描仪的数据处理
1、点云生成:扫描仪采集的原始数据形成点云,每个点包含XYZ坐标和反射强度信息。
2、配准:将多个扫描位置的点云数据拼接成完整的三维模型。
3、滤波与降噪:去除噪声点和异常数据,提高模型质量。
4、建模与可视化:将点云数据转换为三维网格模型或曲面模型,用于后续分析和展示。

以下是您可能还关注的问题与解答:
Q:三维激光扫描仪的测量精度受哪些因素影响?
A:测量精度受多个因素影响,主要包括:设备本身的性能参数、环境条件(如温度、湿度、大气压力等)、目标物体的表面特性(如反射率、粗糙度)、扫描距离等。
Q:三维激光扫描仪与传统测量方法相比有什么优势?
A:三维激光扫描仪具有速度快、精度高、非接触式测量、全面采集等优势。它能在短时间内获取大量三维数据,特别适合复杂形状和大型物体的测量。
Q:三维激光扫描技术未来的发展趋势是什么?
A:未来发展趋势包括:提高扫描速度和精度、增强数据处理能力、集成其他传感技术(如多光谱成像)、发展智能化和自动化功能、拓展应用领域等。
总结来说,三维激光扫描仪通过精密的光学系统和先进的信号处理技术,实现了快速、精确的三维空间数据采集。它的工作原理涉及激光测距、精密机械控制和复杂的数据处理算法。随着技术的不断进步,三维激光扫描仪在工业、建筑、文化遗产保护等领域的应用将愈发广泛,为我们提供更加丰富和精确的三维空间信息。






