










































































































































接触对刀仪是利用普通车床外加的监控检测设备利用普通车床自身的位置测量系统来进行工作的。总体来说,它虽然是附属于普通车床,为提高车床加工的精度和效率而设计的,但作为一套独立的仪器,对普通车床用接触对刀仪的研究设计方案应包括对刀原理的研究与实现、精密机械部分、电气控制部分、接触对刀仪的操作方法、误差与精度分析等部分。机械部分是接触对刀仪的主体部分,它主要包括传感器的设计与连接臂的设计,其中传感器的设计尤其关键,要求它能适应内孔车刀、端面车刀、螺纹刀、外圆车刀等不同刀具和不同刀偏角的刀具;另外,传感器表面要有硬度要求,不能因为频繁地撞击表面产生小的凹坑,影响对刀仪的精度,当然,我们也可以对传感器的测头进行修磨;传感器应保证应有的精度要求;传感器的结构设计合理,重量不能太大且安装方便,适合刀具的对准与操作。电气控制部分主要包括接口电路的设计,对刀仪在刀具接触到传感器后应有声光信号显示,以便操作者进行及时操作,传感器的触发信号要能准确地反映到数控系统;要对刀补值算法的获得进行算法研究,根据算法对系统进行参数化编程以获取刀尖点的信息并分析计算刀补值。
操作方法要求给出具体的操作步骤,根据对刀仪的工作原理及实际特点,按照对刀的操作规程,用户可以方便地对普通车床进行对刀;应给出对刀过程的注意事项,以免错误操作,影响加工生产。接触对刀仪的开发设计工作完成之后,要对其进行多方位的误差与精度分析,分析产生误差所有可能的来源并对精度作出分析,校验其可行性。
一、刀具位置偏差原因分析
因为对刀仪是建立在车床自身系统测量的基础之上的,普通车床的加工是由程序控制完成的,所以坐标系的确定与使用非常重要。根据IS0841标准,普通车床坐标系用右手笛卡儿坐标系作为标准确定。普通车床平行于主轴方向即纵向为Z轴,垂直于主轴方向即横向为X轴,刀具远离工件方向为正向。
1.普通车床坐标系与普通车床参考点
普通车床坐标系是指以机床原点为坐标原点所建立的坐标系,普通车床的机床原点通常取在卡盘前端面与主轴中心线交点处,一般机床原点在普通车床出厂前由生产厂家已经调整好,不允许用户随意变动。普通车床参考点是指刀架上某一固定点,即对刀参考点退离距机床原点O最远的一个固定点R点,该R点在机床出厂时也由生产厂家调试好,并将数据输入到数控系统中。因此机床参考点R对机床原点O的坐标是一个已知数,一个固定值。一般对刀之前,必先使普通车床进行“回零”操作(即使刀架返回参考点操作),就是使刀架上对刀参考点与机床参考点R重合。此时CRT屏幕上显示值x,z即为机床参考点R相对于机床原点O点在X方向和Z方向的值。
2.工件坐标系与起刀点
工件坐标系(又称为编程坐标系)是指以工件原点(或称编程原点)为坐标原点所建立的坐标系。编程坐标系供编程用,是人为设置的。工件原点可以是工件上任意点,但为了编程,方便数值计算,一般普通车床编程原点选工件右端面或左端面与中心线交点作为工件原点,数控编程时应首先确定工件坐标系。起刀点(又称程序起点)即刀具刀位点相对工件原点OP的位置,即刀具相对于工件运动的起始点,工件坐标系的建立实际上是确定刀具起刀点相对于工件原点的坐标值的过程。目前普通车床上建立工件坐标系的方法一般用相应的G指令来设定。当工件坐标系建立以后,并未与机床坐标系发生任何联系,此时,两者仍然相互独立,数控系统既不知道工件在机床中的位置,也不知道刀具刀位点在机床中的位置,即无法按所编程序正确加工,因此加工之前,还必须确定刀具刀位点与机床坐标原点O之间的关系,即一般加工之前通过对刀方法来实现。
本对刀仪的设计使用的是NUM数控系统,现将NUM数控系统坐标变换简单介绍如下:当CNC上电时,没有测量起点可用于计算轴的运动。在执行任何程序编制的运动前必须对系统进行初始化(各轴回原位),回原位过程将给CNC系统提供用于编程运动的坐标系统。如果回原位过程没有完成,则只能进行点动操作。系统通过一个回原位过程建立一个测量起点OM(原位开关被安置在一个特定的物理位置上)。每个轴的回原位过程是这样完成的:在由车床或数控系统制造厂商定义的运动方向上(测量起点设置方向)激活起始限位开关,数控系统的处理器能计算所有相对于机床起点或零点的位移量,在回原位(测量起点设备)过程完成后,系统将由制造厂商定义的每个轴的坐标变换值应用到每个轴上以建立测量起点。为了写一个零件程序,编程者必须定义一个程序起点,该点通常也是零件图上的尺寸测量起点。
3.刀具位置补偿
对于刀具位置补偿来讲,下列3种情况下,均须进行刀具位置的偏置补偿:
(1)在实际加工中,通常是各把不同位置的若干把刀具(即各把刀具的刀尖在刀架上相对于某固定点的位置各不相同)加工同一轮廓尺寸的工件,而编程时往往都建立统一的坐标系,要求使所有的刀尖都移到坐标系中的一个基准点上,或者以一把刀为基准设定工件坐标系,因此须将其余刀具的刀尖都偏移到此基准刀尖位置上。利用刀具位置补偿即可完成。
(2)对同一把刀具而言,当刀具重磨或更换新刀后,再把它准确地安装到程序所设定的原位置,是非常困难的,总是存在位置误差,这个位置误差在实际加工后即成为加工误差,此时,需通过刀具位置补偿功能来修正刀具安装位置误差。
(3)每把刀具在使用过程中都有不同程度的磨损,而磨损后的刀尖位置与编程位置存在差值,同样会造成加工误差,这种误差也可通过刀具位置补偿功能来纠正。
二、刀补值的确定
1.试切法
通过以上分析可知:虽然我们可以通过回参考点确定对刀参考点的坐标,也可以通过测量确定工件与机床坐标的位置,但工件坐标系建立以后并未与机床坐标系发生任何联系,两者仍然相互独立,数控系统既不知道工件在机床中的位置,也不知道刀具刀位点在机床中的位置,还是不能确定它们的相互位置。这样就需要用到试切法对刀,试切法对刀应先进行手动机床回参考点操作,将1工件毛坯夹持于卡盘上,测出D(工件直径)、L(工件伸出3爪夹盘距离),启动机床,以手动方式进行对刀(以90°外圆车刀为例)。第一步:将车刀刀尖与棒料端面轻轻接触对刀,然后Z向不动,X向退出车刀,记下CRT动态坐标值Z;第二步:将车刀刀尖与棒料外圆轻轻接触对刀,然后X向不动,Z向退出车刀,记下CRT动态坐标值X;第三步:计算刀补值(Ll,L2)。代入公式计算即可计算出L2,L1的值。
最后,将刀补值(Ll,L2)输入CNC系统中。刀具补偿值输入数控系统后,刀具的运动轨迹便会自动校正。试切法也可用于多刀加工,其它各刀的对刀过程一样,将各刀的刀补值分别输入相应刀偏寄存器中供数控系统补偿使用。也可以以第一把刀的刀位点作为基点,将其余各刀的刀位点相对第一把刀的偏差值作为补偿值。用上述方法对刀,实质上是使每把刀的刀尖与工件外圆母线与端面的交点接触,利用这一交点为基准,算出各把刀的刀偏量。采用试切法对刀时,精确对刀的方法是:手动对刀时,将工件试件端面、外圆车1刀,并仔细测量试件伸出卡盘长度L、试切外圆直径D。降低进给速度,并使每把刀对刀接触工件的程度尽可能统一,可有效提高试切对刀的精度。采用试切法对刀优点是无需特殊对刀工具,操作者只需按常规操作,简便快速,而且较为正确有效。
2.其它刀具的对刀方法
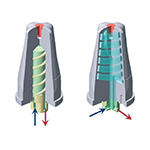
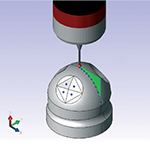
对于装有多把刀具的普通车床而言,每把刀之间也存在着位置偏差,如果逐个去用试切法确定刀补值,势必会造成精度下降,而且效率低下,费时费力。接触对刀仪对刀时先设置标准刀,用试切法对标准刀进行对刀,其它刀具相对于标准刀的刀补值是通过对刀仪的传感器来获取,由数控系统计算而得,这样各把刀相对于工件的刀补值也就确定了。接触对刀仪刀补值的设定与手动对刀法所不同的是它能自动将信息捕捉并运算得到刀补值,将其存储起来。简单地说,接触对刀仪的对刀原理就是通过对刀装置不同刀具相互之间的位置予以确定,由CNC系统计算出位置补偿值(刀补值),并将刀补值储存起来的过程。
三、结束语
没有安装自动对刀装置的普通车床在加工零件时,一般采用实切法对切削的零件进行对刀。刀尖加工零件时,输入所用刀具的几何尺寸(刀具长度补偿)再测量加工零件的实际尺寸,来修改刀具几何补偿值及加工零件的程序,这样造成很多占机试刀工时,试件废品增加、效率低,不利于实现自动化加工。带对刀装置的普通车床的操作者可以根据工艺要求进行刀具准备,在加工零件时,当对刀装置接收到信号后,机床立即停止移动,信号反馈给CNC系统,系统自动把测量的值送入几何补偿里,这时操作者可以根据测量值修改相关的零件加工程序。本文对于普通车床中接触对刀仪相关技术问题进行分析,进行概念介绍与刀具位置偏差原因分析,并且对于刀补值的确定方法进行介绍。作者希望它们能够在提高普通车床加工精度的效率中发挥更大的作用。






